

Jacob Sitzberger
Work Samples

Assistive Device Project
Problem Statement: Make a personal assistive device that could help someone with a disability.
Solution: A device for individuals who have mobility issues that can be used as an attachment to a traditional clothing hook. It has the ability to screw onto the end of a clothing hook decreasing strain on the user due to the product's thickness.

Device CAD Render

Engineering Drawing
Repurposed Bench Project
Problem Statement: Reuse an old product that is broken or unfunctional and repurpose it to have a new function.
Solution: A baby crib was redesigned to be a bench that can be used as furniture in a home.

Render of Full Assembly

Renders & Drawings of All Parts







Mechanical Boat Project
Problem Statement: Create a kinetic sculpture that has a theme.
Solution: A boat sculpture was made which had a crank that when turned would move two propellors and move the boat side to side to simulate the movement across the water.
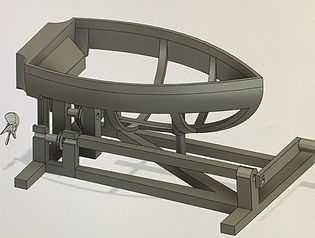
Render of Full Assembly


Images of Actual Prototype



Alternate Angles of Full Assembly


Images of Actual Prototype
Robotic Rope Walker
Problem Statement: Design a rope walker that is based on animal movement that can make it across a 120ft rope over boneyard creek.
Solution: A robotic koala was created which consisted of 4 arms, a chassis, and a powertrain. Opposing front and back arms moved in phase together to maintain stability during each step.

Render of Full Assembly
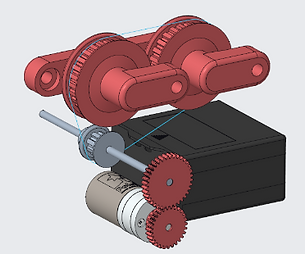
Robot Powertrain

Robot Gear System

Robot Arm

Robot Gear Train
Warehouse Floorplan CAD Drawing (Internship)
Problem Statement: The company was moving to a new larger warehouse and needed a floorplan blueprint that maintained a good workflow while maximizing space and worker efficiency.
Solution: A schematic was created after measuring all machine dimensions and discussing optimal positioning with employees.

Final Floorplan


3D Render of New Warehouse
Sandia Senior Design Project
Problem Statement: Sandia Laboratories needed a device that had the ability to grip and rotate 4 different parts for automatic quality inspection that could fit into a 6 inch cube.
Solution: A 6-axis manipulator with an AI inspection system was created to complete automated inspection batch processes for the desired parts.
Render of Full Assembly

Translational & Rotational Axes

The rotational axes consisted of the ABC axes, angled the parts in all directions for inspection.

The translational axes consisted of the XYZ axes, which aligned the gripper with the part on the tray to be picked up.
Gripper Mechanism



These were the three main brainstormed ideas for the gripper design which was ultimately a variation of the middle idea.


Here is the final iteration of the gripper design after testing. It used a mini rack and pinion system that allowed for controlled gripping power. The gripper pictured on the right is in the closed state holding one of the Sandia parts.
Tray Feeder System

The tray is rolled out in the homing phase and is used as a consistent static position for the parts to be stationed so the robot knows where they are and can always pick them up correctly.




Electronics & AI Systems
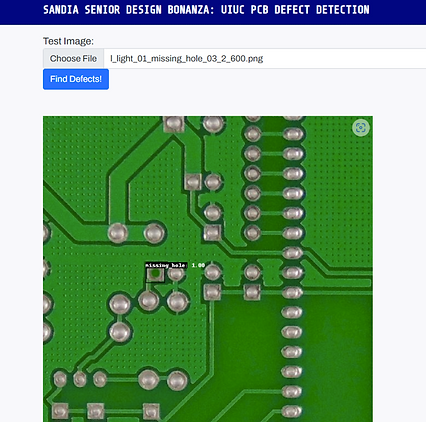
Here is an image of our AI system detecting a surface flaw. It was based on a Pecking University research paper and ended up having a detection accuracy of 96% while having 1/10 of the parameters used by the research paper.



Here is the electronics system. Most of the wires belong to the motors that were used to make the automation possible. The microcontroller was a 3D printer Duet3 board that had the capability of running the motors directly. Everything was inside of the double-shelf cover to keep the mass of wires contained.
Trade Show Information Poster

Project Awards
UIUC ME470 Senior Design Project Class:
The group was awarded the "Outstanding Achievement Award for Excellence in Engineering Design for Best Final Project."
The group also received the "Outstanding Achievement Award for Excellence in Engineering Design for Best Trade Show Display."
Sandia National Laboratories Design Competition (Sponsor):
The group was awarded the "Most Comprehensive Final Design."